|
Xin-Liang Zhong (钟心亮)
Master candidate
|
Biography
I am currently a third-year Master candidate of School of Mechatronic Engineering, Beijing Institute of Technology. My supervisor is Dr. Qingsheng Luo. Prior to that, I received my Bachelor's degree from Beijing Institute of Technology in 2016.
My research interest includes Computer Vision and SLAM.
About me: [Github] [Youtube] [知乎] [Bilibili]工作经验
2023-至今
硬件在环(HIL)的软硬一体链路实现以及基于HIL的智驾参考实现
1)围绕CARLA仿真器,自研数据注入设备以及域控,实现了仿真器-数据注入设备-域控-底盘-仿真器闭环,搭建了相应的HIL台架,将真实硬件设备接入仿真数据进行上车部署前的测试,加速各个链路验证以及算法的迭代落地 2)编写UE4的着色器使CARLA支持鱼眼相机,整套系统支持1V1R的入门级LKA仿真以及4V的APA泊车仿真 3)CARLA仿真器支持了不同实车底盘can协议 4)基于整套系统开发了LKA/APA参考实现,并在实车上进行了验证 5)...
逼真的仿真数据生成用于训练数据的生成以及智驾corner case生成
1)可以添加如下车辆、定义车辆的基本运动方式,也可以让自车运动起来,当然也可以生成一些corner case,例如圆锥桶在地面 2)注意光影细节、同时可以生成天气变化、白天黑夜的图像 2) 更多细节请电话/邮件联系,个人网页只放最基础的demo



2020-2023
单目视觉在基于已知地图的视觉定位工作
一个通用的 基于视觉地图的定位系统. 它包括:1) 支持传统与深度学习特征的地图创建. 2) 分层定位模块. 3) 支持融合轮速、IMU、GNSS平滑.
[Project page] [ZhiHu] [Code Sample_0] [Code Sample_1] [Related Video_0] [Related Video_1]
多机器人纯自主探索主动式协作快速建图
1)主要是多个机器人基于frontier探索点的方式进行快速地图构建与合并地外采样返回小车
AVP-SLAM 自主代客泊车视觉定位方案
对论文[AVP-SLAM: Semantic Visual Mapping and Localization for Autonomous Vehicles in the Parking Lot(IROS 2020)]的复现,并将整个Gazebo仿真器开源。 [知乎介绍] [Code]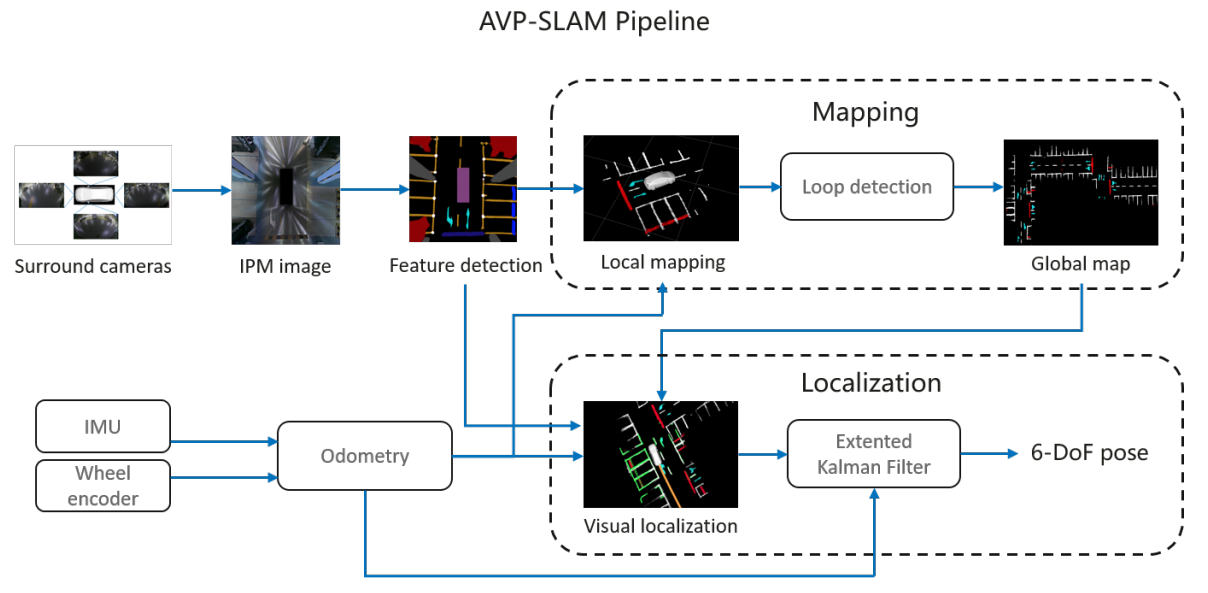
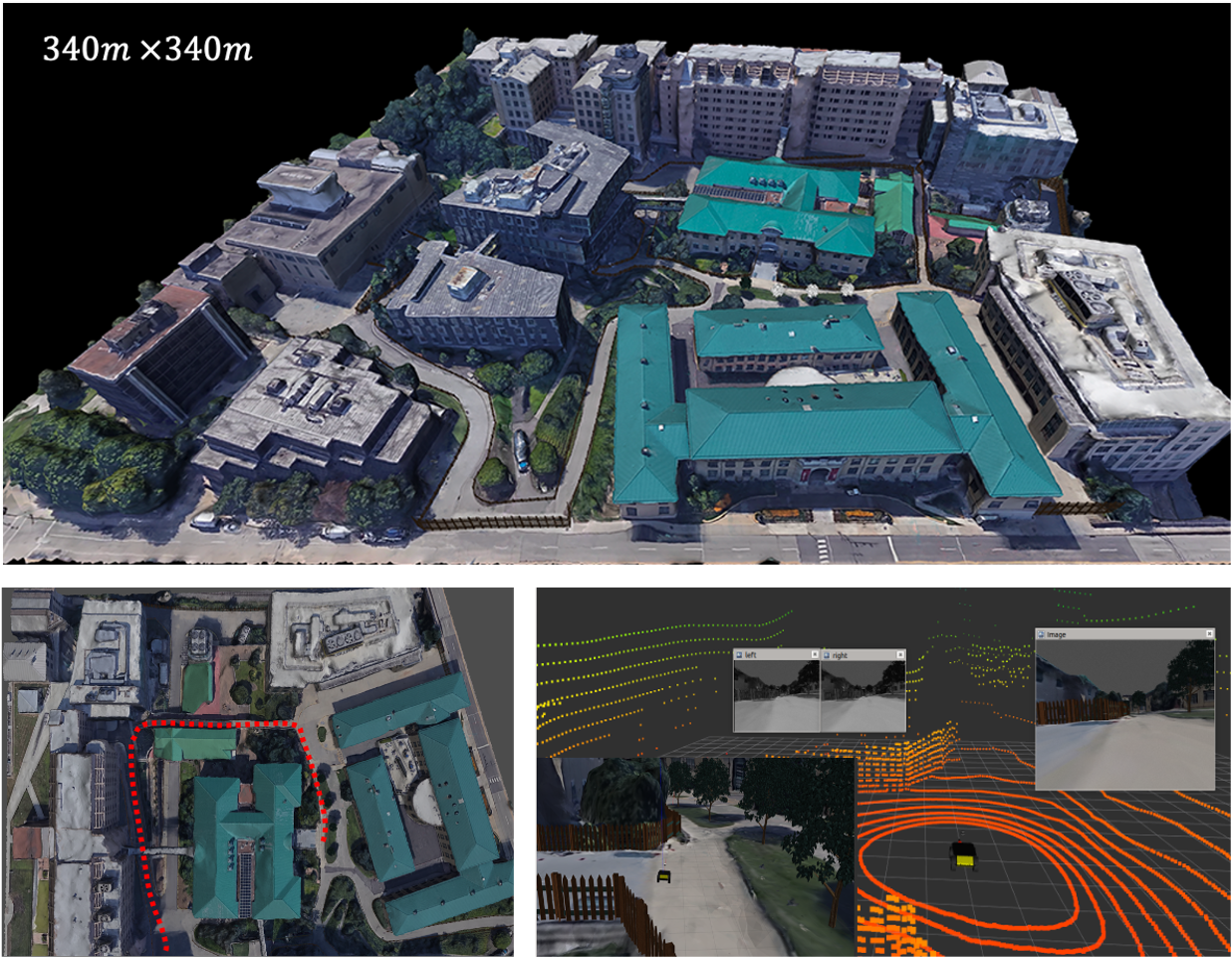
LVIO-SAM 基于因子图的雷达视觉惯性紧耦合里程计
[Code]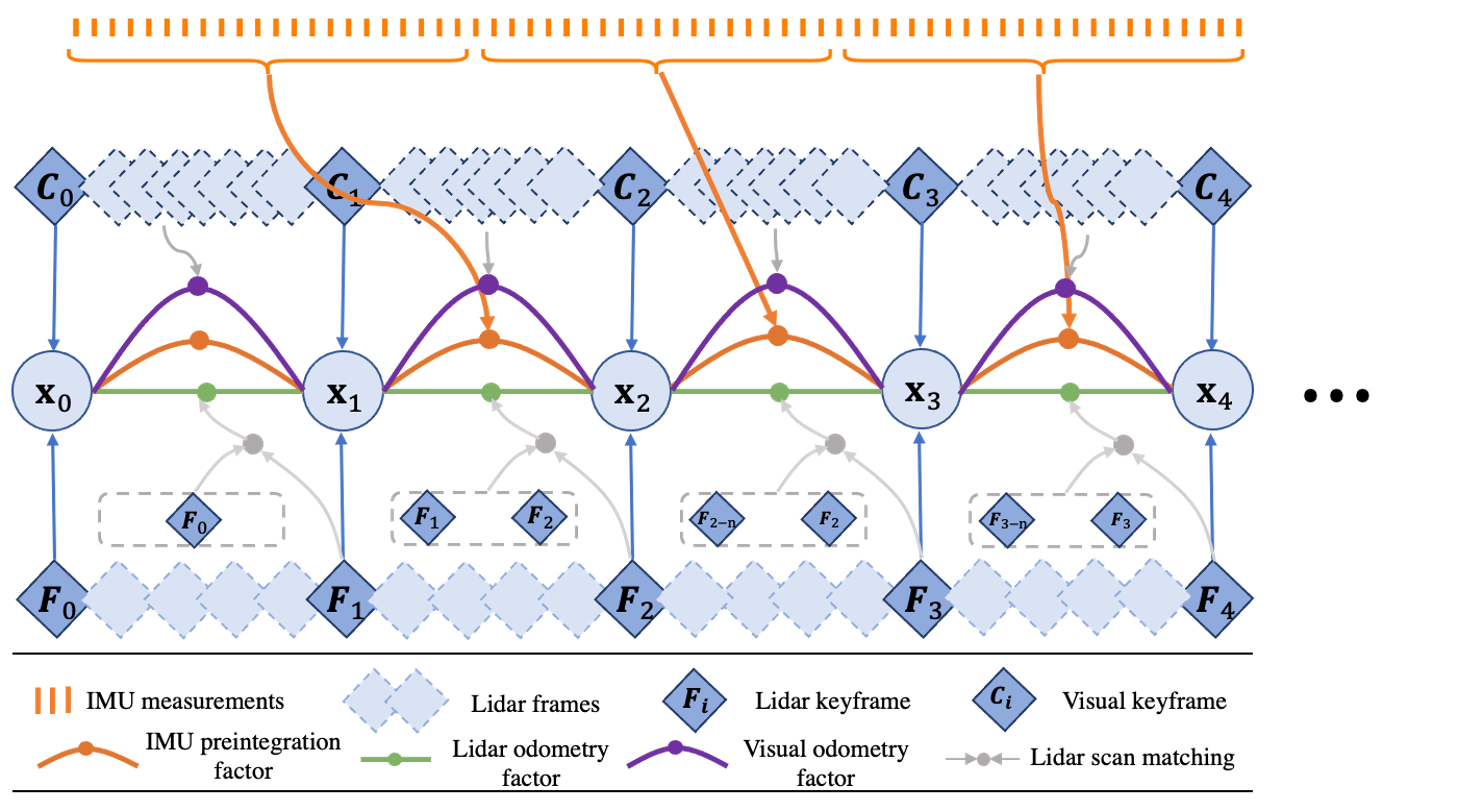
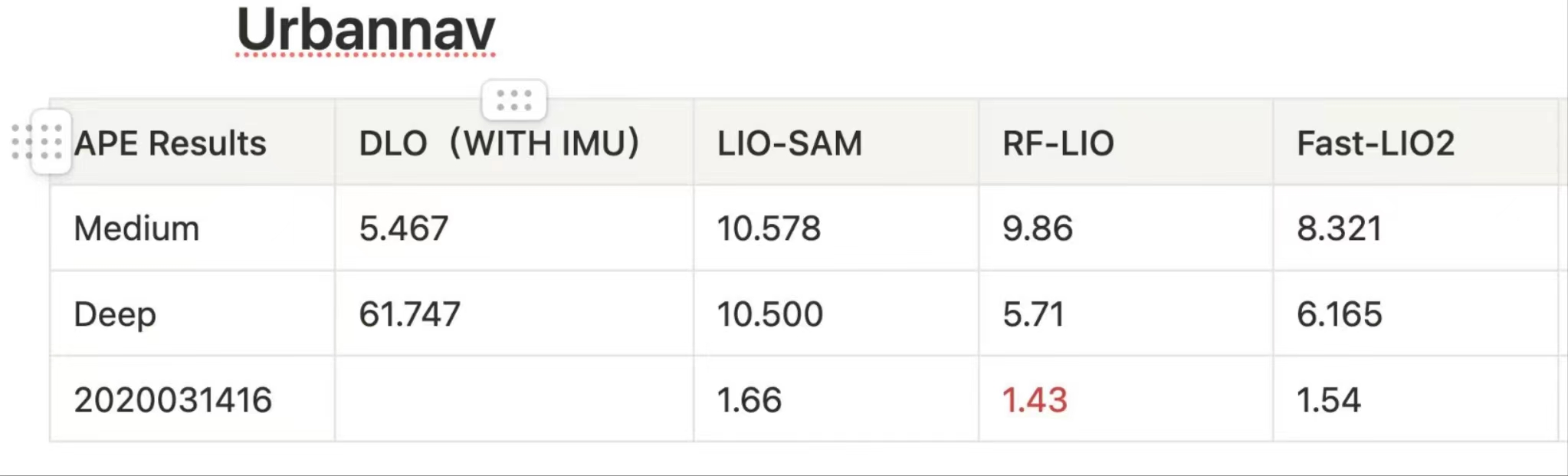
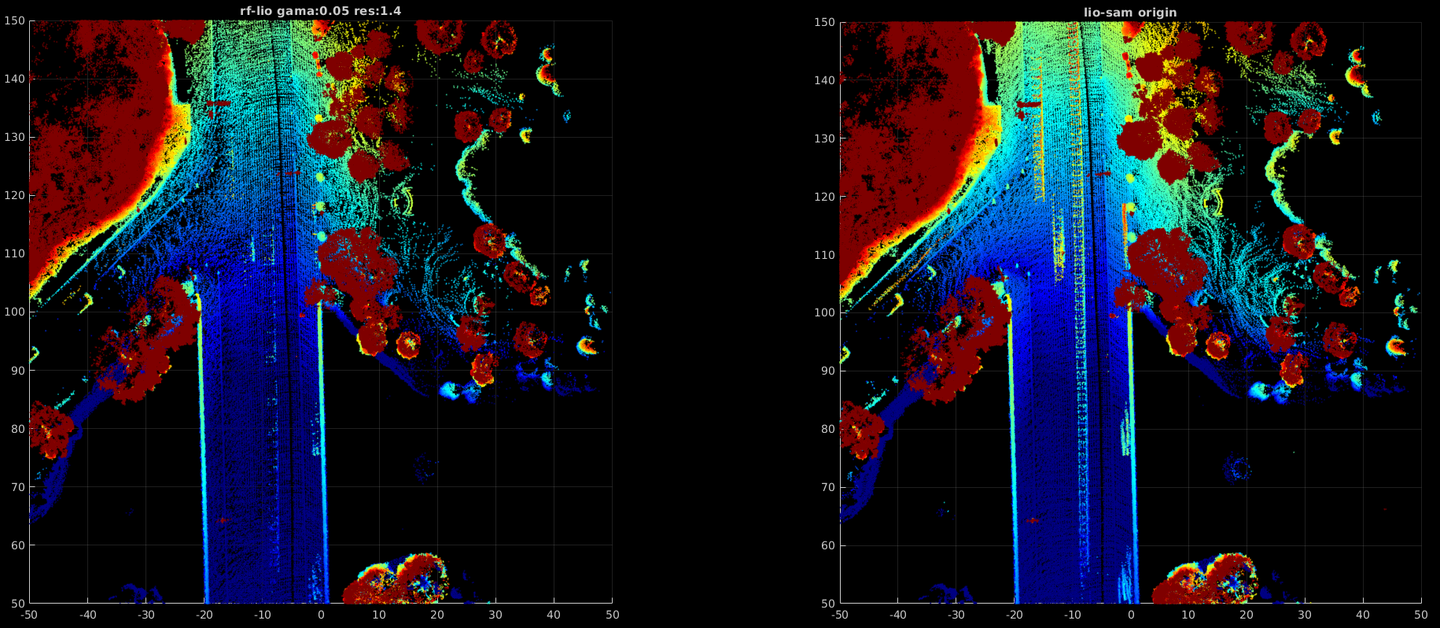
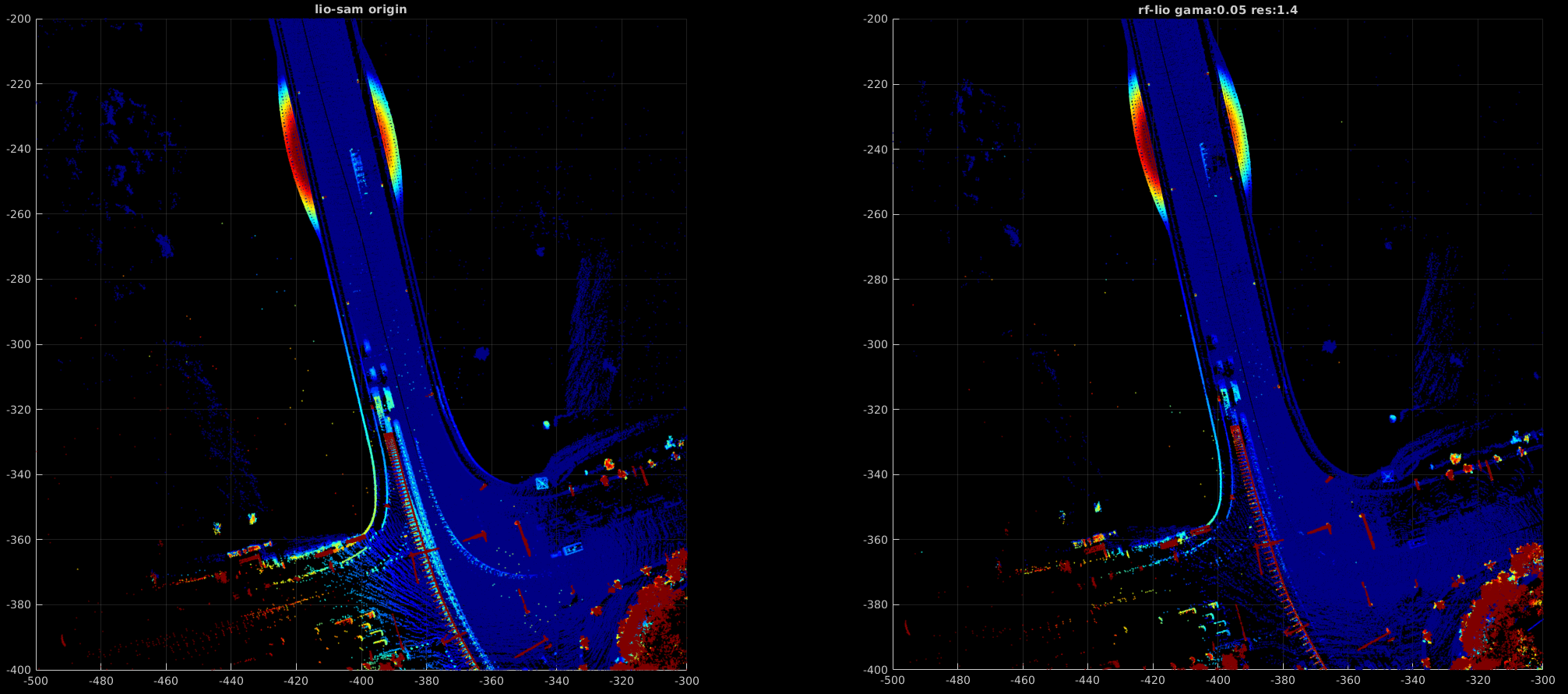
RF-LIO 基于视点可见性的动态物体在线移除LIO方法
基本原理:基于range image的方法将submap和当前激光投影到image,根据深度差判断该点是否为动态点。 1.基本框架与定位结果量化对比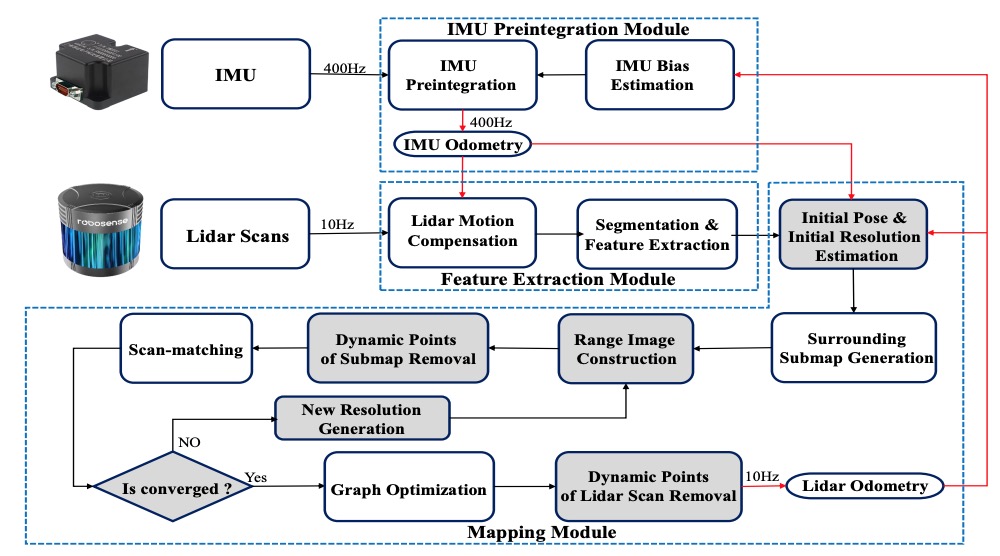
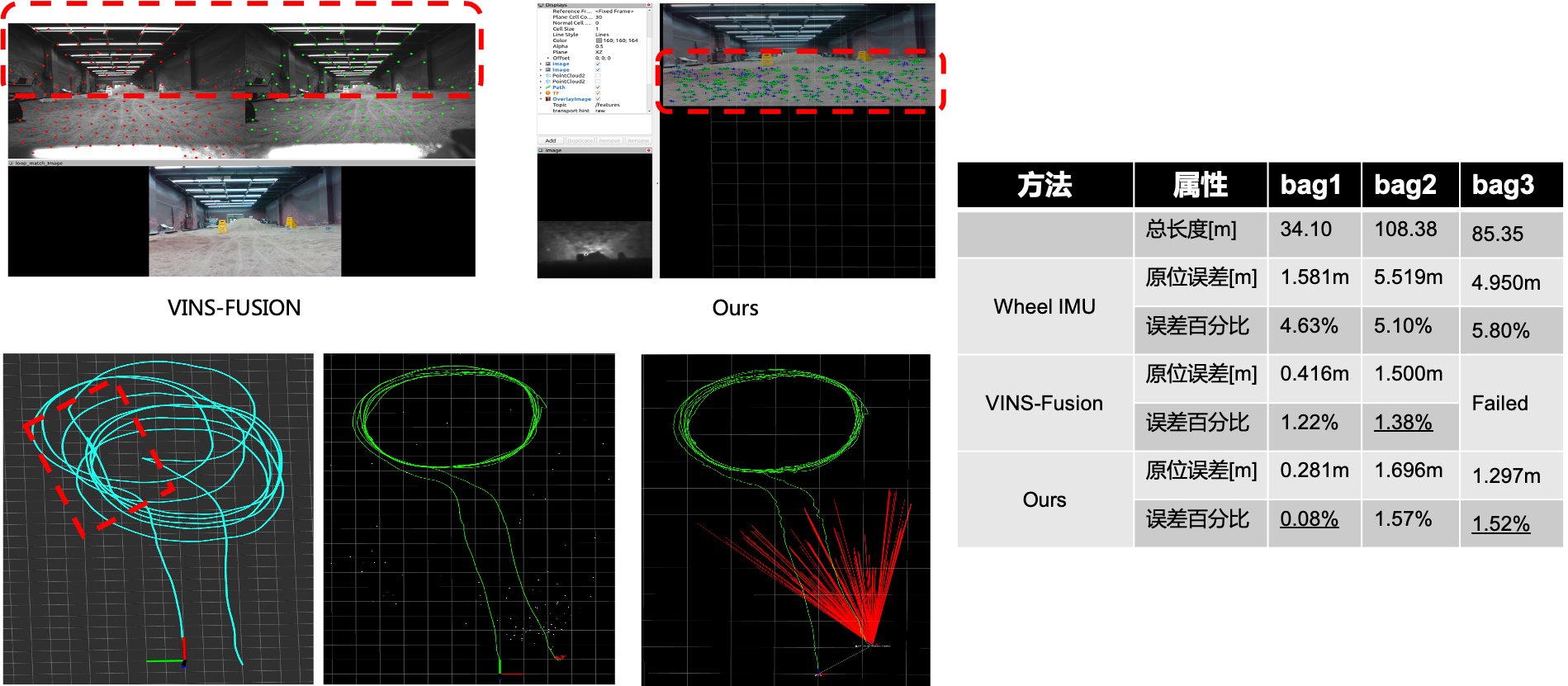
基于打滑估计方法的纹理稀疏场景定位
洞穴自主探索与返回机器人
1.设计了基于图结构的分层自主探索与返回方案,并结合高程地图计算机器人的局部可通行性地图,使机器人能够在崎岖环境下安全的纯自主探索与采样返回,方案最终在莫干山洞穴进行了大量测试并得以验证 2.机器人青科论坛之导航专场分享《面向地外探测的机器人定位建图与自主探索技术研究》,直播在线观看人数5k+
2019-2020
基于纯视觉的低成本XX无人物流车方案
1) 纯视觉定位方案,包含离线建图以及在线定位两大部分. 2) 基于3D点地图的兼容传统与深度特征点描述子的后端重定位框架,平均定位误差95%以上处于30cm以内. 3) 融合单目鱼眼摄像头的语义分割,检测,深度摄像头的深度信息,超声波信息和IMU信息的感知bev的costmap用于规控.
Projects before 2019
|
A tool used for calibrate 2D laser range finder (LRF) and camera.
The package is used to calibrate a 2D LiDAR or laser range finder(LRF) with a monocular camera. Specficially, Hokuyo UTM-30LX have been suscessfully calibrated against a mono camera. [Project page] [Code] |
|
|
A Multi-State Constraint Kalman Filter for Vision-aided Inertial Navigation
The MSCKF_mono package is a mono version of MSCKF. The software takes in synchronized mono images and IMU messages and generates real-time 6DOF pose estimation of the IMU frame. [Project page] [Code] |

|
Auto Label Tool for Autonomous Car.
A tool used for automatic label the road sign. [Project page] [Code] |
|
An offline tool for pose-graph-optimization.
This tool can optimize the pose and eliminate the cumulative error. [Project page] [Code] |

|
Reconstruction of the scene based on RGBD-Camera.
It is a simple SLAM system based on RGBD-cameras. [Video] |
|
DJI Robomasters Summer Camp.
This projects aims to design an autonomous MAV and a mobile robot that can grab the doll and place it in the bucket corresponding to the doll pattern. [News] [Video] |
|
Research on Real-time Location and Construction of Indoor Mobile Robots.
This robot is equipped by the relevant sensor itself can be in a completely unknown environment situation accurately draw the map of the surrounding environment. [Docs] [Video] |
Experiences
- June. 2018 - Aug. 2018 Research Intern, MIG Mobile Robot LAB, Tencent China
- Jul. 2017 - Feb. 2018 Research Intern, SLAM group, DeepMotion China
- Jul. 2016 - Sep. 2016 Research Intern, Robomasters department, DJI China
Awards and Honors
- Jun. 2017: 2017年北京理工大学优秀研究生.
- Jun. 2016: 2016年北京市优秀毕业生.
- Jun. 2016: 2016年北京理工大学优秀毕业生.
- Jan. 2016: 2016年北京理工大学学生科技创新先锋.
- Dec. 2015: 第十四届“挑战杯”全国大学生课外学术科技作品竞赛 一等奖.
- Oct. 2015: 中国航天科技集团公司 CASC 奖学金 一等奖.
- May. 2015: 第八届“挑战杯”首都大学生课外学术科技作品竞赛 一等奖.
- Dec. 2014: 第七届全国大学生创新创业年会荣获“我最喜爱的项目”和“最佳创意项目”.